Face à une augmentation du volume de commandes sur un produit innovant, ce client nous a confié la réalisation d’une machine à haute cadence pour poinçonner des rails en aluminium et y clipser des pièces plastiques.
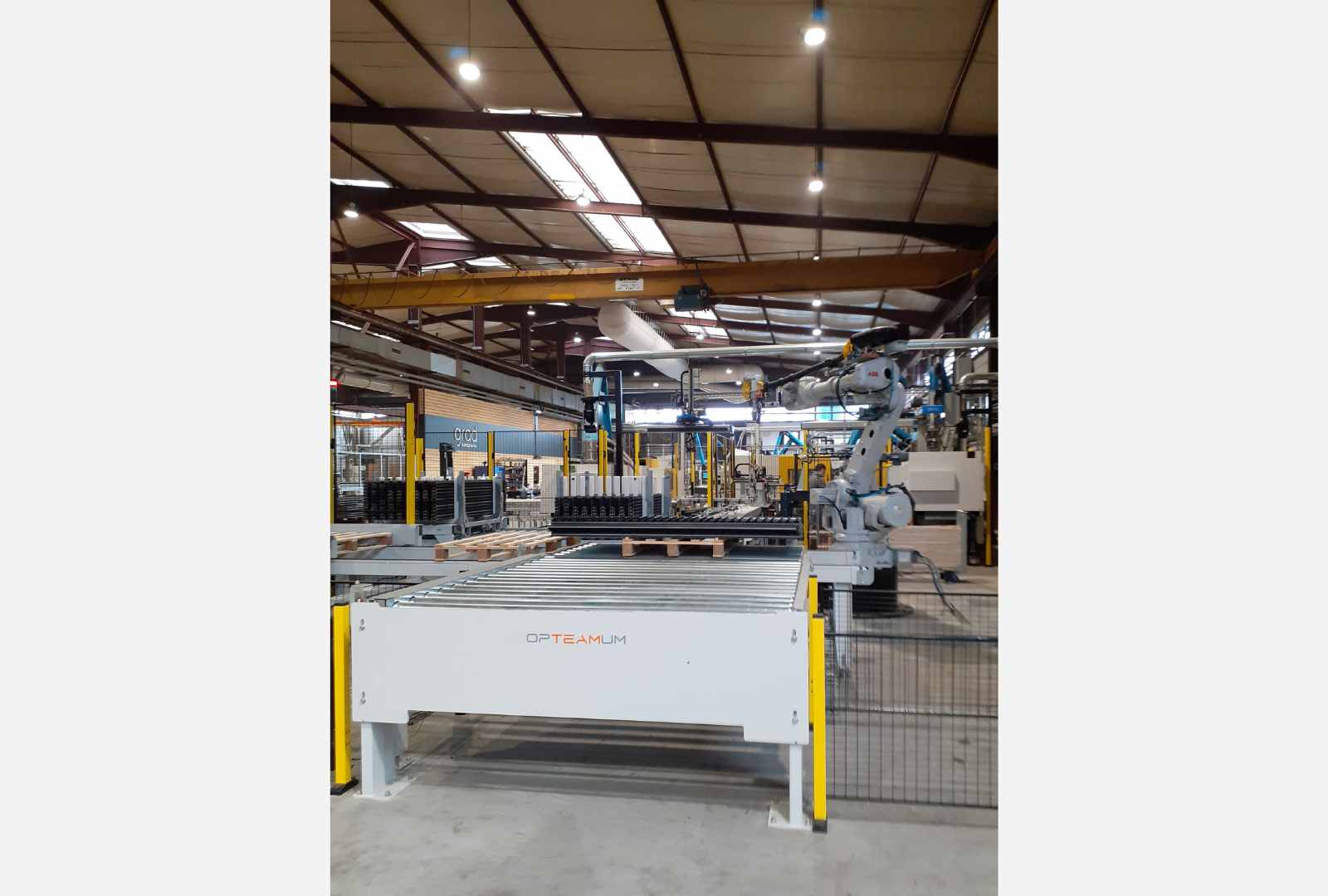
La machine proposée se loge entre deux presses à injecter qui créent les clips plastiques. Ils sont déchargés par deux portiques cartésiens qui les déposent sur des convoyeurs. Ces derniers les acheminent à un portique de clipsage. Un robot prend les rails en aluminium et les charge dans le cœur de ligne. Un axe magnétique équipé d’une pince saisi le rail et le fait avancer sous un axe de poinçonnage et le portique de clipsage.
Une fois le rail terminé, il est étiqueté puis ramené au robot pour qu’il réalise la palettisation en automatique. Les palettes sont sur convoyeur pour permettre de charger et décharger la machine sans avoir à l’arrêter.
Cette machine est conçue pour être flexible : en plus de ses standards, le client peut sélectionner à volonté les entraxes des clips, et nous l’avons amélioré après la mise en production pour gagner 20% de cadence.